Analysis of the reciprocating kinematics of the VDW Silver Reciproc, E-Connect Pro, Ecom, and Endopen endodontic motors: an in vitro experimental study
Article information

Abstract
Objectives
This study aimed to evaluate the actual parameters of four endodontic motors, each adjusted for reciprocating motion, and compare them to the manufacturers’ declared values.
Methods
The motors used were the VDW Silver Reciproc (VDW GmbH), E-Connect Pro (MK Life), Ecom (Woodpecker), and Endopen (Schuster Woodpecker). A custom optical target was attached to the motor contra-angle, the movements were recorded with a high-resolution camera, and the images were analyzed. Engagement, disengagement, net angles, and speed for each operation cycle, duration of clockwise (CW) and counter-clockwise (CCW) movement, duration of standstill after CW and CCW movement, and the number of cycles to complete a full rotation were analyzed. The data were statistically analyzed at a significance level of 5%. The replicability of all reciprocal parameters analyzed was statistically different from that reported by the manufacturers.
Results
There was no statistically significant difference between the VDW Silver Reciproc, Ecom, and Endopen for the engagement angle. The E-Connect Pro was the least reliable at the 150°/30° settings for both angle parameters. There was no significant difference between the set and actual cycle net angles for the VDW Silver Reciproc (p = 0.493). While the actual values for the Ecom and E-Connect Pro were significantly higher than the set (p < 0.001), the actual values for the Endopen were significantly lower than the set (p < 0.001).
Conclusions
Experiments on four commercially available reciprocating endodontic motors revealed that the actual motor values differed significantly from the set values.
INTRODUCTION
Asymmetrical reciprocating kinematics was introduced in endodontics in an attempt to provide safer and more efficient root canal preparation since reciprocating systems permit performing the procedure using only one file [1,2]. Manufacturers claim that this movement reduces the likelihood of instrument twisting due to the periodical change in the direction of rotation, exposing the instrument to lower tension [3–5]. This kinematics has been extensively discussed and studied in recent years and the findings indicate an increase in the files’ resistance to cyclic fatigue [5–11].
Endodontic motors have been extensively used as an aid to treatments, particularly to provide different types of reciprocating motion. There are multiple commercially available motors, each priced differently and promising a different performance. However, it is important to note that the reciprocal angles and rotation speeds of these motors can have a significant impact on the endodontic files used. Any deviations from the standard settings can affect the instrument’s fatigue resistance, as well as its cutting capacity [8]. A previous study that altered the asymmetrical reciprocating kinematics compared to that recommended by the manufacturer showed that decreasing the reciprocation range of the reciprocating motion increased the time to fracture [8,12]. However, the authors advised against increasing rotation in the counter-clockwise (CCW) direction due to the overload of the instrument [8].
Alternative root canal preparation systems using programs and standards for each file set have been launched, including Reciproc (VDW, Munich, Germany) [12–15] with a 150° CCW and 30° clockwise (CW) rotation [7]. The movements resulted in a net angle of 120º, indicating that each cycle of three movements rotates the file completely [9].
The precision of these angles is critical for the clinical professional because it has a direct impact on instrument performance, on the quality of root canal preparation, and, most importantly, on the risk of file separation. Within this context, previous studies had already questioned the reliability of some endodontic motors regarding the actual reciprocating angle and rotation speed [9,16–19]. However, the present study is the first to assess the reliability of the E-Connect Pro (MK Life, Porto Alegre, Brazil), Ecom (Woodpecker, Guilin, China), and Endopen (Schuster Woodpecker, Guilin, China) endodontic motors. These motors are widely commercialized due to their low investment cost compared to more established models on the market, especially among newly graduated dentists.
Therefore, this study aimed to evaluate the actual parameters of four different endodontic motors, each adjusted for asymmetrical reciprocating motion, and to compare the results with the values provided by the manufacturers. The null hypotheses were that there was no statistically significant difference between the proposed and actual values, nor between the motors tested (VDW Silver Reciproc [VDW], E-Connect Pro, Ecom, and Endopen).
METHODS
Sample size calculation
The sample size was calculated using the results of a previous study [17]. To achieve a 5% level of significance, the calculation indicated that each 10-second recording should be repeated three times per sample. The calculation information was tabulated in a Microsoft Excel 2013 spreadsheet (Microsoft, Redmond, WA, USA).
Selection and adjustment of the endodontic motors
The following endodontic motors were tested: VDW Silver Reciproc, E-Connect Pro, Ecom, and Endopen. They have approximate weights of the handpiece and components of 1,100 g, 800 g, 945 g, and 842 g, respectively. All endodontic motors, new and unused, were utilized in the “Reciproc Reciprocating ALL” mode. For those motors in which this exact mode under this name was not available, but that allowed manual adjustment of the reciprocating angles, the settings were standardized to 150° CCW and 30° CW, following the specifications provided by the manufacturer of the Reciproc system. All motors ran with the battery fully charged but unplugged from the power cord. Furthermore, the motors were calibrated before each use, as recommended by the manufacturers.
Kinematic analysis of the endodontic motors
The actual angles were measured in each group using a customized polypropylene target with a diameter of 5 cm and 359 marked lines representing each degree. This method was adopted based on previous research [17,18]. The target was mounted on a disc and then attached to the contra-angle handpieces (Figure 1).
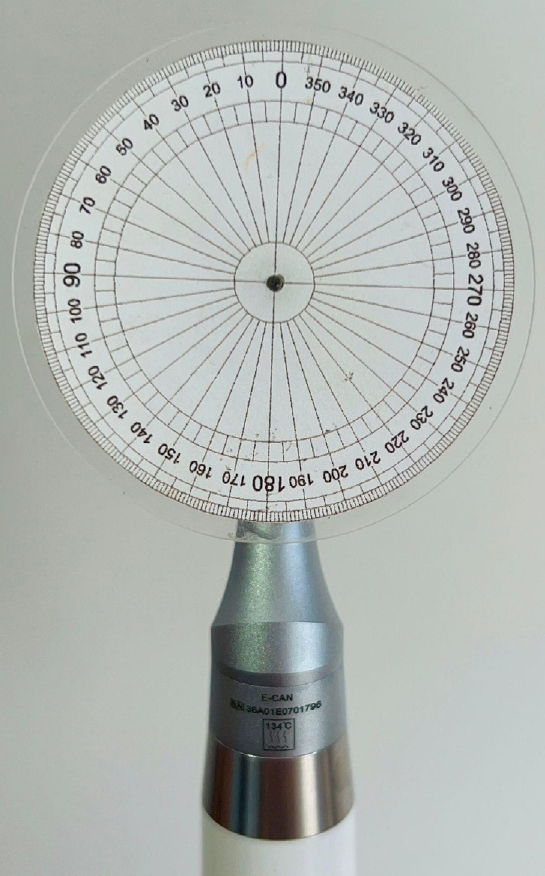
A 5-cm-diameter polypropylene disc marked in degree intervals from 0° to 360° was used in the experiment.
Videos of the optical target operating in asymmetrical reciprocating kinematics were recorded using a super macro lens (Tamron SP AF 90 mm; Canon, Tokyo, Japan), with a focal adjustment of 0.45, connected to a high-speed camera (Phantom VEO 610L; Infinity Photo-Optical Company, Centennial, CO, USA). The lens was positioned 30 cm from the target (Figure 2). The camera was set to record high-quality videos at 3,000 frames per second (FPS) and a resolution of 960 × 960 pixels.
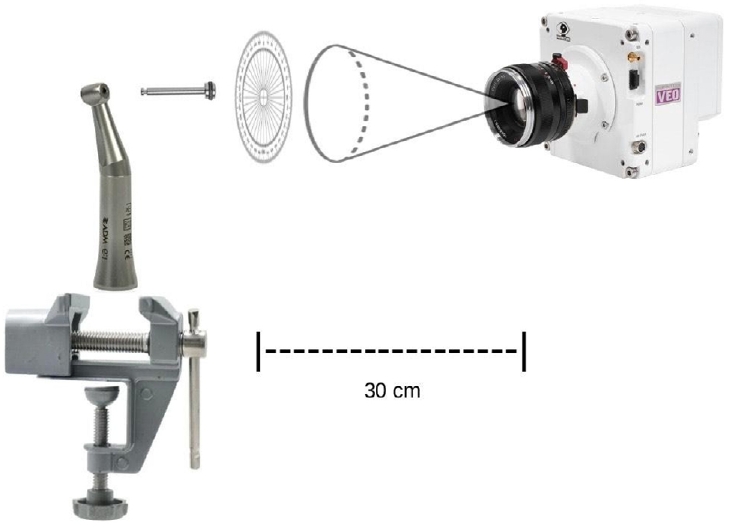
Schematic representation of the camera assembly, lens, target, motor, and water-aligned contra-angle used for image capture.
Each cycle of asymmetrical reciprocating motion of the motor with the optical target was recorded three times, with each recording lasting 10 seconds, for a total of 12 shots. In each recording, in MOV file format, 10 complete cycles of sequential reciprocating motions were chosen at random for analysis and evaluation of kinematic data. Each cycle was analyzed to identify the duration of each movement.
Ten sequential cycles within each footage were analyzed using the Vision Research software (Vision Research Inc., Wayne, NJ, USA) installed on a personal computer (Intel i3 8th Gen, 8GB RAM, 1TB HD; Dell, Round Rock, TX, USA). The rotation angle between two consecutive frames was based on the difference in the orientation of the graduated lines (Figure 1) and the values automatically provided by the software (Figure 3). The following data were obtained and used to calculate the kinematic parameters, as defined in previous studies [3,9,17,18]:
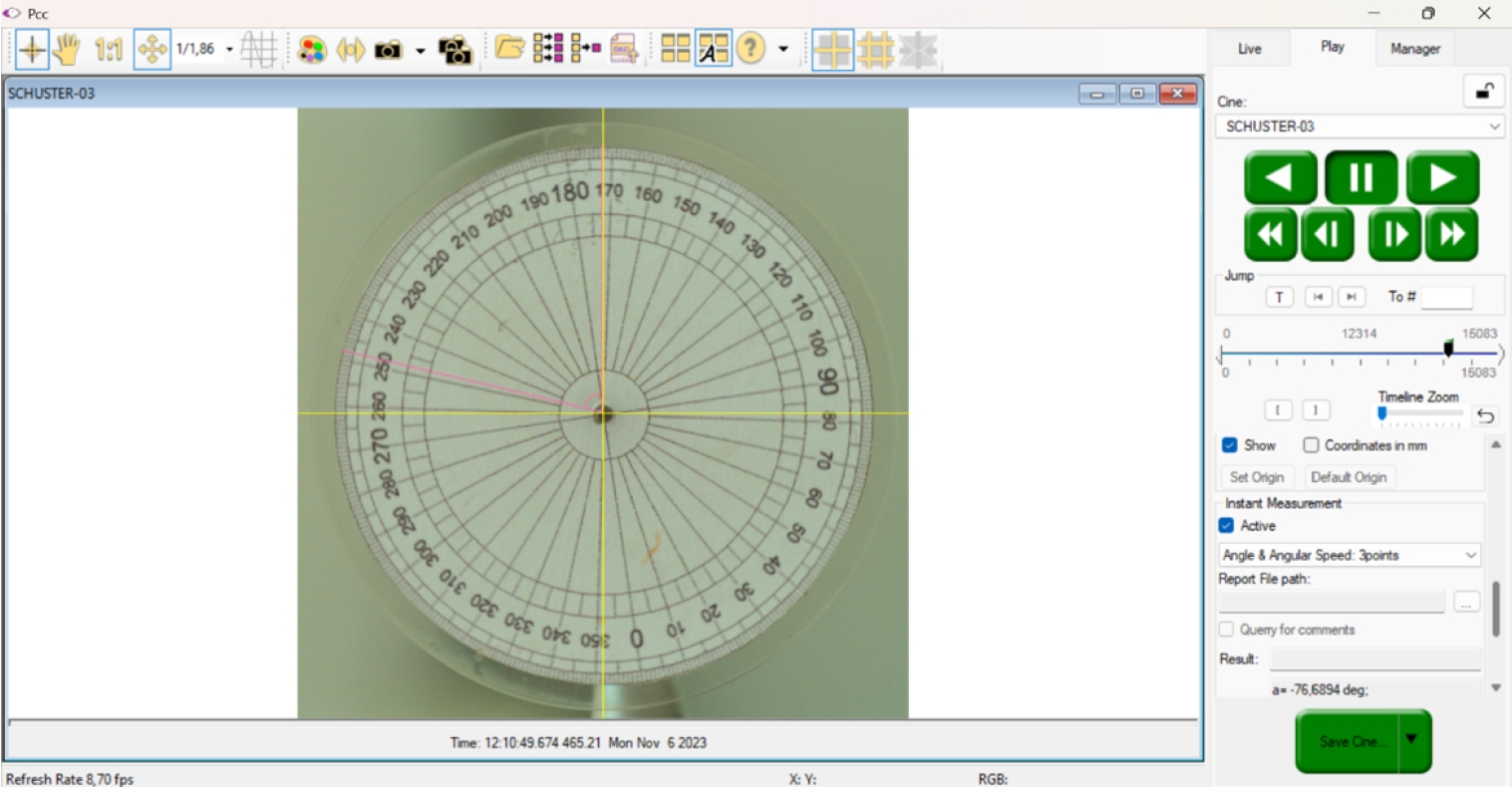
Print screen Vision Research software (Vision Research Inc., Wayne, NJ, USA).
(1) Engagement angle (CCW, º): θe
(2) Disengagement angle (CW, °): θd
(3) CW movement duration (ms): Dcw
(4) Duration of standstill after CW movement (ms): Scw
(5) CCW movement duration (ms): Dccw
(6) Duration of standstill after CCW movement (ms): Sccw
After collecting these data, the following parameters were calculated:
(1) Net angle of the cycle (°): θe − θd
(2) Engagement speed (revolutions/min [rpm]): (θe / Dccw) × (60,000 ms / 360°)
(3) Disengagement speed (rpm): (θd / Dcw) × (60,000 ms / 360°)
(4) Speed of the total reciprocating cycle (rpm): (θe + θd) / (Dccw + Sccw + Dcw + Scw) × (60,000 ms / 360°)
(5) Number of cycles to complete a full rotation: 360° / (net angle)
Statistical analysis
For comparison of the endodontic motors, normally distributed data were analyzed by one-way analysis of variance, followed by the Tukey test for multiple comparisons when the data were homoscedastic and the Games-Howell test when the data were heteroscedastic. The Kruskal-Wallis test was applied when the data did not fit a normal distribution, followed by the Student-Newman-Keuls test. It was observed that most variables showed a normal distribution across the groups. However, some variables, such as the duration of standstill after CW movement, the net angle of the cycle, and the number of cycles to complete a full rotation, exhibited a non-normal distribution in certain groups.
The actual and set values of engagement angle, disengagement angle, and net angle were compared using the Student t-test and one-sample Wilcoxon test. Statistical calculations were performed using IBM SPSS version 23 (IBM Corp, Armonk, NY, USA) and BioEstat 5.0 (Fundação Mamirauá, Belém, PA, Brazil), adopting a level of significance of 5%.
RESULTS
The endodontic motors VDW Silver Reciproc, Ecom, and Endopen, which did not differ statistically from each other regarding the engagement angle, showed significantly lower values than the E-Connect Pro motor. Regardless of the motor, the actual engagement angles were significantly greater than the set values (p < 0.001). This finding was also observed for the disengagement angles (p < 0.001), where the Ecom motor presented a significantly lower disengagement angle than the VDW Silver Reciproc. In turn, the VDW Silver Reciproc showed a lower value than the Endopen, whose disengagement angle was significantly smaller than that measured for the E-Connect Pro motor (Table 1).

Mean and standard deviation of the kinematic variables of the different endodontic motors studied.
The VDW Silver Reciproc motor had a significantly shorter CCW movement duration compared to the Ecom, which in turn had a shorter duration than that observed for the E-Connect Pro motor. The latter showed a significantly shorter duration than the Endopen motor (Table 1). Regarding the duration of the standstill after CCW movement, the E-Connect Pro demonstrated the shortest time, which was significantly shorter than that observed for the Ecom and VDW Silver Reciproc motors, with no significant difference between these two. Meanwhile, the duration of standstill after CCW movement for the Endopen motor did not differ significantly from the values measured for the E-Connect Pro and Ecom motors (Table 1).
The CW movement duration was significantly shorter in the VDW Silver Reciproc and E-Connect Pro motors, which did not differ significantly from each other. For the Endopen motor, the CW movement duration was significantly shorter than that of the Ecom motor (Table 1).
Considering the duration of the standstill after CW movement, the VDW Silver Reciproc and Ecom motors, which did not differ significantly from each other, showed significantly shorter times than that observed for the Endopen motor. As for the E-Connect Pro, the standstill duration after CW movement did not differ from the other three motors (Table 1).
There was no significant difference between the set and actual net cycle angles for the VDW Silver Reciproc motor (p = 0.493). While the Ecom and E-Connect Pro motors exhibited actual values significantly greater than the set ones (p < 0.001), the Endopen motor (p < 0.001) showed actual values significantly lower than the set. When comparing the four motors, the VDW Silver Reciproc and Endopen were associated with significantly smaller net cycle angles than those measured for the E-Connect Pro motor. Additionally, the Ecom motor had a net cycle angle that did not differ significantly from the other three motors (Table 1).
Regarding the engagement speed, the Endopen motor showed a significantly lower value compared to the VDW Silver Reciproc and Ecom motors, which did not differ statistically from each other and had lower values than those found for the E-Connect Pro (Table 1). The E-Connect Pro motor also exhibited the highest values among all motors for both disengagement speed and total reciprocating cycle speed. For these two variables, the Ecom motor had the lowest values compared to the remaining motors. However, while the VDW Silver Reciproc motor had a lower disengagement speed than the Endopen, the result was reversed for the total reciprocating cycle speed between these two motors (Table 1).
The number of cycles required to complete a full rotation was significantly lower for the E-Connect Pro motor compared to the VDW Silver Reciproc and Endopen motors, which did not differ significantly from each other. For the Ecom motor, the number of cycles to complete a full rotation did not differ significantly from any of the other three motors (Table 1).
DISCUSSION
Automated mechanical preparation of root canals is predominantly performed using nickel-titanium instruments. These instruments can operate in either rotary or reciprocating kinematics. However, accurate reproduction of the reciprocating kinematics appears to be more complex [19]. The reliability of these angles is critical because of their effects on instrument performance (such as cutting efficiency and debris removal) and, consequently, on the quality of root canal preparation [8–11].
In addition, file separation within the root canal system is one of the most frequently reported iatrogenic incidents by dentists, caused by several factors. Among these factors, reciprocation angles stand out, as larger angles in asymmetrical reciprocating motion increase the risk of instrument fracture. This highlights the importance of ensuring that the intended angles are properly achieved for each programming setting, thereby providing greater safety during the procedure [7–9]. However, the null hypothesis was rejected, indicating a significant difference between the actual and set values.
Saber et al. [8] found that reducing the difference between the engaging and disengaging angles, with lower values in the CCW angle, increases the instrument’s resistance to fracture by subjecting it to less stress. However, this comes at the cost of less canal transportation and longer preparation time. Reducing the number of cycles by increasing the CCW angle values was discouraged since it would put more stress on the instrument. Other studies [5,7,16] have indicated that instruments operating at higher speeds, similar to the findings of this research, are more susceptible to fracture compared to when used at lower rotational speeds.
Kinematic values are not fully disclosed by some manufacturers, and there is limited information available regarding the asymmetrical reciprocating motion generated by the motors [19]. Angular kinematic data are neither publicly available nor officially provided by the manufacturer VDW. Therefore, the values assumed in the present study for the Reciproc system, 150° CCW and 30° CW at a speed of 300 RPM, were based on the literature [3,8,9,17–19].
The evaluation of asymmetrical reciprocating kinematics requires a detailed methodology. Previous studies have used different cameras to record this kinematics, including a 1,000 FPS camera with a resolution of 224 × 64 pixels [18], a 1,200 FPS camera with 336 × 96 pixels [17], a 960 FPS camera with 1,136 × 384 pixels [20], a 600 FPS camera with 432 × 192 pixels [19] and a 2,400 FPS camera with 800 × 800 pixels [9]. To achieve optimum precision, this study used a high-resolution camera with 3,000 FPS and a resolution of 960 × 960 pixels, a significant improvement compared to previous investigations.
The low reliability observed in the present study for the reciprocating angles of the VDW Silver Reciproc motor is consistent with the literature [9,17–19]. However, this is the first study that assessed the reliability of the Ecom, Endopen, and E-Connect Pro endodontic motors. These three motors were recently launched on the market. Our findings indicate low reliability of the E-Connect Pro motor at reciprocating angles. Regarding the Ecom and Endopen, both exhibited characteristics and variations similar to the VDW Silver Reciproc motor, which showed values closer to those recommended by the manufacturers.
The VDW Silver Reciproc motor showed actual CCW and CW angles in Reciproc mode that were greater than those reported in the literature [9,19]. On the other hand, our values were consistent with those observed in another study [20]. Variations in FPS and in the number of pixels in the images between studies may explain the divergence in the results compared to the studies by Braambati et al. [9] and Fidler et al. [19]. Fidler [18] highlighted that the use of high-speed cameras allows for accurate analysis of the kinematics of endodontic motors and that accurate values of alternative angles influence the cyclic fatigue resistance of instruments. Similarly, Irmak and Orhan [17] emphasize that additional studies conducted with high-speed cameras and higher resolutions are necessary and should be carried out to evaluate more accurate real kinematics. Braambati et al. [9] demonstrated that higher FPS rates provide greater accuracy in kinematic assessment. An in-depth examination of the reported data reveals that variations in the engagement angles of the VDW motor correspond to the disengagement angles in degrees. This suggests that discrepancies in the set values for the cutting angles are proportionally reflected during the disengagement phase, aligning with the findings of another study [19,20].
When the actual CCW and CW angles exceed the set values, the preparation and shaping capacity are compromised, the instrument’s resistance to cyclic fatigue is reduced, and root microcracks may form; however, the preparation time is reduced [8,9,11,16]. Despite their low reliability, the VDW Silver Reciproc, Ecom, and Endopen motors had similar variations, with none of them showing an adjusted engagement angle discrepancy greater than 52%. The highest engagement angle inaccuracy was observed for the E-Connect Pro motor, which was 131%. Furthermore, the VDW Silver Reciproc motor showed a discrepancy of 28% in engagement angle in the reciprocating mode.
The E-Connect Pro motor, on the other hand, produced discrepant values that were twice or more than those set for the engagement and disengagement angles, indicating lower precision when compared to the other motors. These angle errors resulted in a net cycle angle greater than 120° of the stipulated movement, allowing the system to operate much faster and with fewer cycles per rotation. More research is needed to identify possible mechanical and electromagnetic differences in the composition and manufacturing of the E-Connect Pro motor versus other motors.
Recent studies investigated the effect of rotary motor power on kinematic accuracy [9,18,19,21]. While the VDW Silver Reciproc motor requires a battery case and a handpiece connection cable, the Ecom, Endopen, and E-connect Pro motors are wireless, a fact that may improve ergonomics but potentially introduce differences in power stability and control. Although all tested motors have predefined angles for use in the reciprocating mode, only the VDW Silver Reciproc motor has the designation “Reciproc mode” with fixed angular settings, while angle adjustment is possible in the other motors. The flexibility of the other motors, although advantageous in customizing performance, may contribute to inconsistencies between programmed and actual motion parameters. Additionally, discrepancies observed in actual versus set values, especially for engagement and disengagement angles, may reflect limitations in internal motor control mechanisms, such as torque management, sensor feedback, or mechanical inertia.
Each time the motor transitions from CCW to CW and vice versa, it briefly interrupts its displacement. These interruptions are necessary for the motor to stop and change the direction of rotation, and this process is controlled by the endodontic motor unit. Fidler [18] demonstrated that, in order to reach the declared cycle speed, the standstill time was compensated by increasing the speed during the rotation phases, as speculated by Gambarini et al. [16]. Fidler [18] found a stopping time of 6.4 ± 0.8 ms for the VDW Silver Reciproc motor, while another study [9] reported a variation of 0.83 ms in the Reciproc mode, which is consistent with the data obtained here. This fraction of a second is caused by the stop required to change direction and, according to some studies [18,21], can be influenced by loose mechanical components. However, Braambati et al. [9] used less sensitive cameras, which resulted in longer image frames than those used in the present study. It is worth stating that the present study focused on the angular parameters obtained, with the standstill time information being collected solely to clarify the data presented.
During the CCW movement, there was a progressive reduction in speed after a certain rotation point, especially for the Endopen and E-Connect Pro motors, with the minimum time of stoppage to subsequently initiate the change of direction, resulting in values significantly lower than those observed for the other motors. This is because the speed reduction made the need to immediately stop the engagement angle toward the reverse action less abrupt.
The duration of the standstill after CW movement did not differ significantly between the VDW Silver Reciproc and Ecom motors, whereas the E-Connect Pro and Endopen motors exhibited a significantly shorter duration. The results are consistent with the literature [21] and can be explained by the lack of clearance between the mechanical parts of the motor, which are new and unused instruments, as well as the absence of a torsional load during the reciprocating movement observed in clinical practice [18,21].
Although most of the analyzed variables showed a normal distribution, some specific variables, such as the duration of standstill after CW movement, the net angle of the cycle, and the number of cycles to complete a full rotation, exhibited a non-normal distribution in certain groups. The limited number of observations per group may hinder the approximation to a normal distribution, especially for variables highly sensitive to small variations. This may contribute to the observed heterogeneity and justifies the use of nonparametric tests in some statistical comparisons.
The engagement and disengagement speed results appear to be associated with the other parameters analyzed (Table 1). The fact that the speed was greater than 300 rpm, as stated by the manufacturer VDW [3,20], may have caused the angles to exceed the adjustment values. Some authors suggest a close relationship between rotational speed and file separation, in which higher engagement and disengagement speeds lead to a reduction in resistance to cyclic fatigue [4,16,18,22–24].
According to a previous study [21], a possible explanation for the asymmetrical kinematic differences between actual and set speed and angulation values is the movement’s mechanical inertia, which can compromise reliability [21]. In other words, even after the control unit of the device determined the stop action, inertia may have allowed the movements to continue. As a result, the greater the speed, the more effective this property is.
Another study [19] revealed that asymmetrical reciprocating motion exhibits more complex kinematics when analyzed frame by frame on a computer, showing variations in rotational speed at each phase, similar to the present study. In comparison, both studies showed no statistically significant difference in net cycle values and presented similar results regarding cycle duration and standstill duration for the VDW motor [19].
As previously mentioned, all tests were conducted with the motors operating without any resistance, an uncommon condition during canal preparation in clinical settings. This might have led to the higher actual values compared to the predetermined ones. Previous studies [9,17,25] have also identified this limitation in their methodologies. Further research, whether ex vivo or clinical, using conditions that simulate root canal shaping, is necessary to confirm the clinical efficacy of these motors and to develop strategies aimed at reducing the risk of file separation [3,19]. Furthermore, this study evaluated only one motor from each manufacturer. Although only new motors were used, the specific models tested may differ from other commercially available motors of the same brand. Therefore, future studies should include a larger number of motors to ensure a more comprehensive and representative analysis.
The inherent differences in the manufacturing process and in the mechanical performance of endodontic motors may influence the results obtained. However, manufacturers generally do not provide detailed information regarding the internal architecture of these devices. Although the present study was based solely on experimental performance data, it is important to highlight that factors such as the precision of the electronic control unit and the type of drive system (brushed or brushless) may theoretically influence torque and rotation stability and, consequently, the effective engagement and disengagement angles. A more in-depth analysis of these engineering differences and manufacturing parameters, therefore, represents a relevant aspect that warrants further investigation.
All four motors did not follow the expected 150º/30º engagement/disengagement pattern. However, the VDW Silver and Endopen motors have net angular values near 120º, reaching 360º shortly after three engagement/disengagement cycles.
CONCLUSIONS
Analysis of four different commercially available reciprocating endodontic motors revealed that the actual motor values differed significantly from the set values. Notably, greater discrepancy was observed for the E-Connect Pro endodontic motor compared to the VDW Silver Reciproc, Ecom, and Endopen motors.
Notes
CONFLICT OF INTEREST
No potential conflict of interest relevant to this article was reported.
FUNDING/SUPPORT
The authors have no financial relationships relevant to this article to disclose.
AUTHOR CONTRIBUTIONS
Conceptualization, Data curation, Investigation, Methodology: França C, Braambati D, Félix CCRB, Ferreira MANS, Frozoni M. Formal analysis: França C, Bronzato JD, Braambati D, Félix CCRB, Ferreira MANS, Frozoni M. Validation: França C, Bronzato JD, Braambati D, de-Jesus-Soares A, Frozoni M. Writing - original draft: França C. Writing - review & editing: França C, Bronzato JD, Braambati D, de-Jesus-Soares A, Frozoni M. All authors read and approved the final manuscript.
DATA SHARING STATEMENT
The datasets are not publicly available but are available from the corresponding author upon reasonable request.